
mrpas
v2.0.0
Published
A Field of View (FOV) computation algorithm.
Downloads
64

Readme
MRPAS
Installation
Just use npm:
npm install mrpasOr grab the code from the repository and include it in your project.
Usage
Instantiation
Instantiate a Mrpas object by passing it the map dimensions and a callback for determining map cell transparency:
const Mrpas = require("mrpas").Mrpas;
const fov = new Mrpas(20, 20, (x, y) => map[x][y].transparent);Compute FOV
Compute the field of view for any set of coordinates by calling the Mrpas#compute() method and passing it the origin coordinates, FOV calculation radius and two callbacks: one for determining whether a call has been marked as visible, and the othe for marking it as visible:
fov.compute(
10,
10,
7,
(x, y) => map[x][y].visible,
(x, y) => map[x][y].visible = true
);To calculate the FOV on the entire map, regardless of radius, you may pass Infinity as the radius value. Just remember that the transparency callback (the one passed to the constructor) will need to account for this, returning false when a cell outside the map is checked.
Map dimension changing
Should your map change dimensions, you can inform Mrpas about it by calling Mrpas#setMapDimensions():
fov.setMapDimensions(40, 40);TypeScript
MRPAS includes a TypeScript declaration file. It can be used in TypeScript projects without additional typings:
import { Mrpas } from "mrpas";
const fov: Mrpas = new Mrpas(20, 20, (x: number, y: number): boolean => map[x][y].transparent);
fov.compute(
10,
10,
7,
(x: number, y: number): boolean => map[x][y].visible,
(x: number, y: number): void => map[x][y].visible = true
);About MRPAS
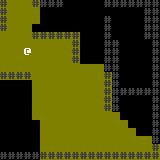
MRPAS, or Mingos' Restrictive Precise Angle Shadowcasting (Precise Angle Shadowcasting for short) is a field of view (FOV) computation algorithm. Given a 2D grid with a source point S and n points marked as obstacles, it will determine all points visible from S.
To visualise this, let the following be a 2D grid of 20 by 20 points. The character @ represents the field of view source, # characters represent obstacles. Cells with yellow background are in the source point's field of view:
Real life uses
This algorithm was conceived in the year 2008 for the purpose of being used in a roguelike game. To this day, roguelikes remain the focus of MRPAS.
The algorithm was originally written in C and was included in the roguelike library libtcod. It also contained a C++ wrapper.
Since 2008, MRPAS has been implemented in various languages, and has been successfully used in numerous roguelike games.
Restrictiveness vs. permissiveness
The name itself relates to other FOV algorithms, some of which are considered to be permissive, e.g. Permissive FOV. The "permissiveness" means that many more points are considered to be in FOV than one would consider "natural".
MRPAS is in that regard restrictive: it allows far less points into the FOV, resulting in a more natural-looking shape of the field of view.
Symmetry
A FOV algorithm is considered symmetric given that the following is true:
Given any set of points A and B, when B is in FOV of A, then A is in FOV of B.
In other words, a field of view is symmetric when all of the points seen from source can also see the source, while all the points not seen by the source, cannot see the source either.
MRPAS is asymmetric.
Considering the mathematics behind determining the FOV, the line of sight from A to B will be computed differently than from B to A. This results in symmetry artifacts, e.g. points A and B where only one can see the other.
The algorithm's asymmetry can be seen on the following image, where the . character has been used to mark asymmetric points (if on yellow background, they can be seen from the source, but cannot see the source; if on black, the source is visible from them, but it cannot see them):
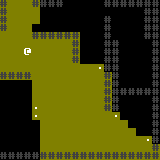
On the above map, 1.6% of all points not containing an obstacle are asymmetric.
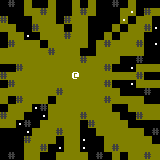
The percentage of asymmetric points is within the range of single digit numbers, depending on the map layout. An "outdoor" map with scattered single point obstacles will always contain the most symmetry artifacts.
For comparison, here's an "outdoor" map with 3.9% asymmetric points:
Performance
MRPAS was written with performace in mind. It processes as few points as possible, discarding the ones obviously out of FOV. Since raw numbers, such as FOV computations per second, are meaningless without context, suffice it to say that MRPAS tends to match or outperform all popular FOV algorithms.
Images
FOV images have been generated by FOV Torture Chamber.